Optical Subteam
Caitlin and Luke
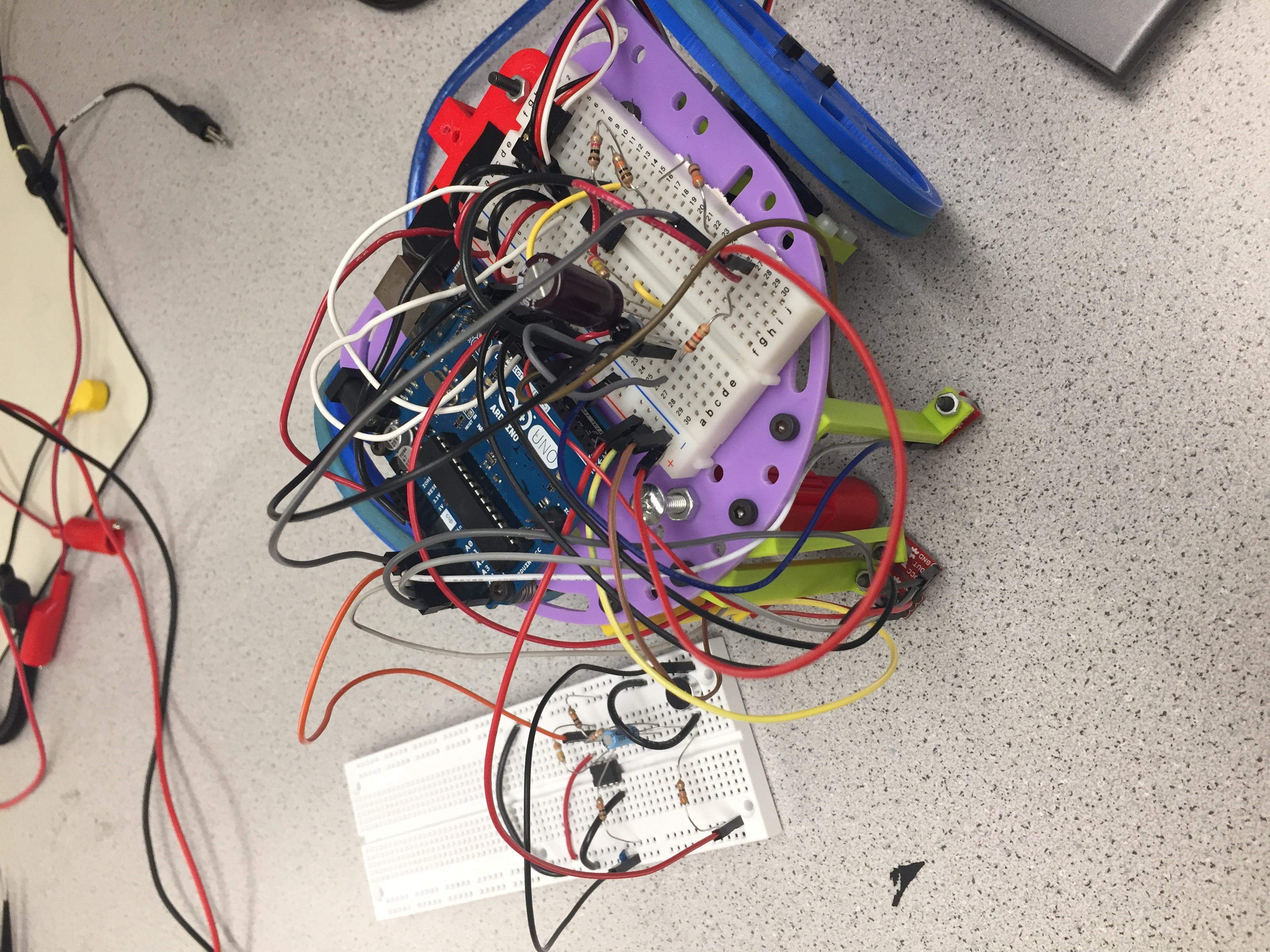
First, we created the phototransistor circuit on a breadboard and hooked the output up to our Arduino to test our use of the FFT library. Our ad-hoc procedure of testing the IR detection consisted of the following:
- While holding the powered-on IR hat ~6 inches from the phototransistor, run the fft_adc_serial program to collect frequency data
- Display the data outputted by the program in the serial monitor
- Copy these values and paste into excel to graph
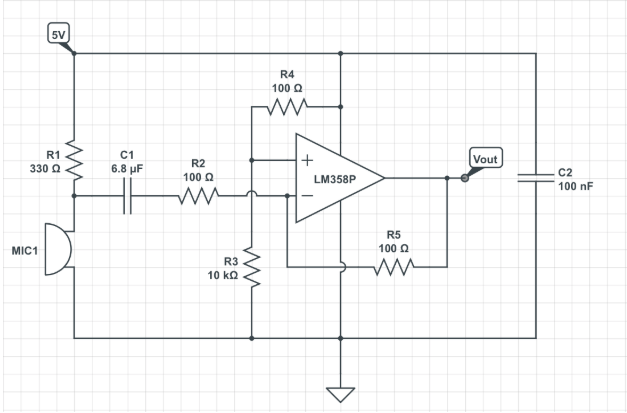
Observe the graph below of a successful detection of the target frequency of 6.08 kHz.
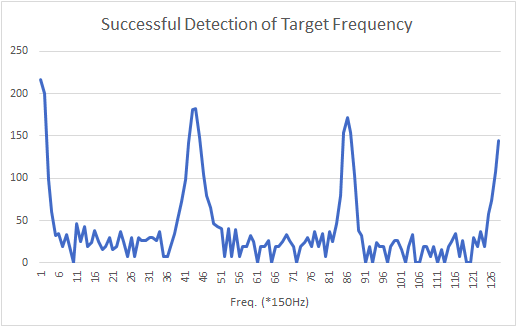
Notice how the value in bin ~43-44 spikes. This is our circuit detecting the target frequency! There are a total of 256 bins, the first 128 of which we examine, and each bin has a width of about 150 Hz, which we determined from the following data and calculations:
- Arduino Clock Speed = 16 MHz
- Clock cycles to complete one ADC conversion = 13
- Pre-scalar value (set in the fft_adc_serial program) = 32
- 16 MHz / 13 cycles / 32 = ~38 kHz == Sample Frequency!
- 38 kHz / 256 bins = 150.24 Hz == Bin Width!
We noticed that our circuit detects the 6.08 kHz signal, but the peak appears in bins 43 or 44, which mathematically translates to about 6.4 kHz. With the bin width we calculated, one would expect 6.08 kHz to appear in bin 40 or 41. This error in bin location may be due to the actual clock speed being slower than 16 MHz, which is the ideal clock speed.
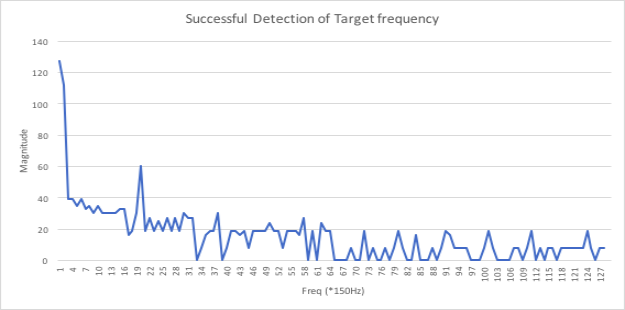
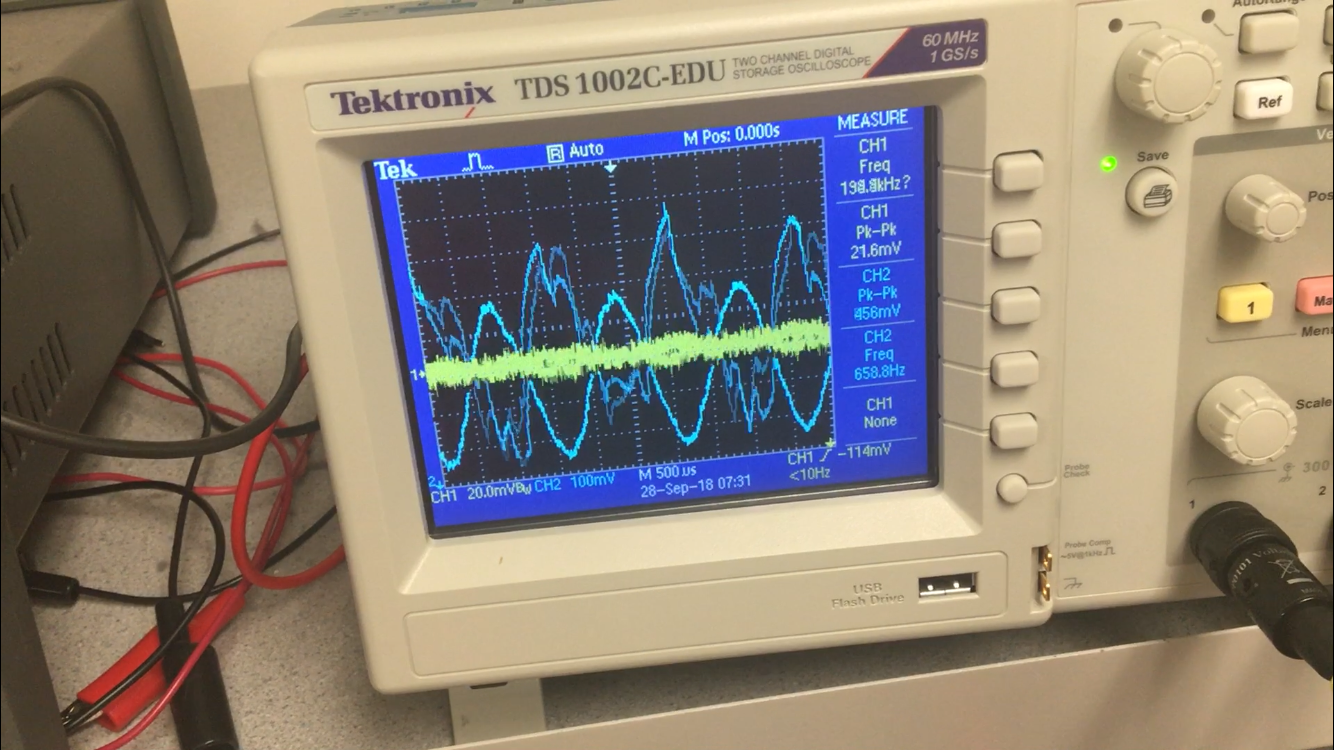
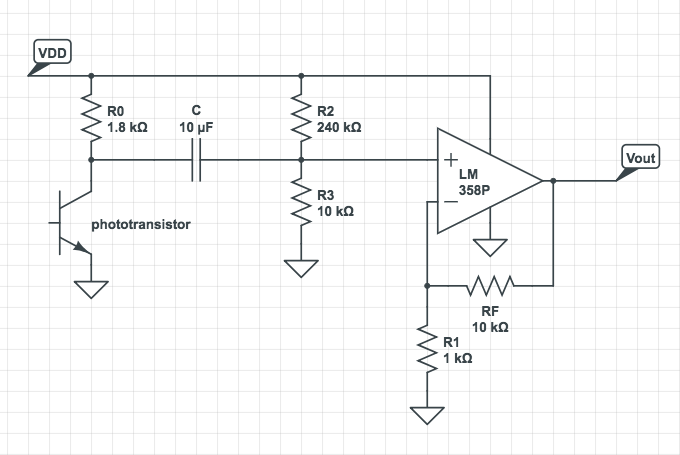
Now that we successfully detected the target frequency from a short distance, we needed to employ an amplifying circuit to allow us to detect from longer distances (~2 feet). Below is a diagram of our final optical circuit incorporating the LM358P non-inverting op-amp. It’s composed of a non-inverting amplifier and an accompanying circuit to reduce and control the input of DC voltage into the amplifier chip.
The non-inverting amplifier was designed to give a gain of 11 based on the following gain equation and resistor values: Av = 1 + RF/R1. Our RF resistor value was 10kΩ and our R1 resistor value was 1kΩ. The op-amp could only handle a maximum of 4V DC voltage, otherwise it would rail out, so the amount of DC voltage being inputted into the op-amp had to be regulated. We added a large capacitor, of capacitance 10μF, to block the DC voltage. If a DC voltage is applied across the capacitor, it will charge up, whereas if an alternating current (AC) is applied, the capacitor attempts to keep its voltage level constant, therefore letting current into the circuit.
To accompany the capacitor, we added a voltage divider so as to control the amount of DC voltage flowing into the amplifier chip and limit it to approximately 200mV, which, after the amplifier’s gain of 11, would maintain a DC voltage of approximately 2V, ensuring that the op-amp wouldn’t rail out. The resistor values for this voltage divider were calculated using Vout = Vin(R3/(R3+R2)) where Vout = 200mV and Vin = Vdd = 5V. R2 was found to be 24 times that of R3, so we used resistor values R2 = 240kΩ and R3 = 10kΩ.
A full diagram of the Optical circuit is below.
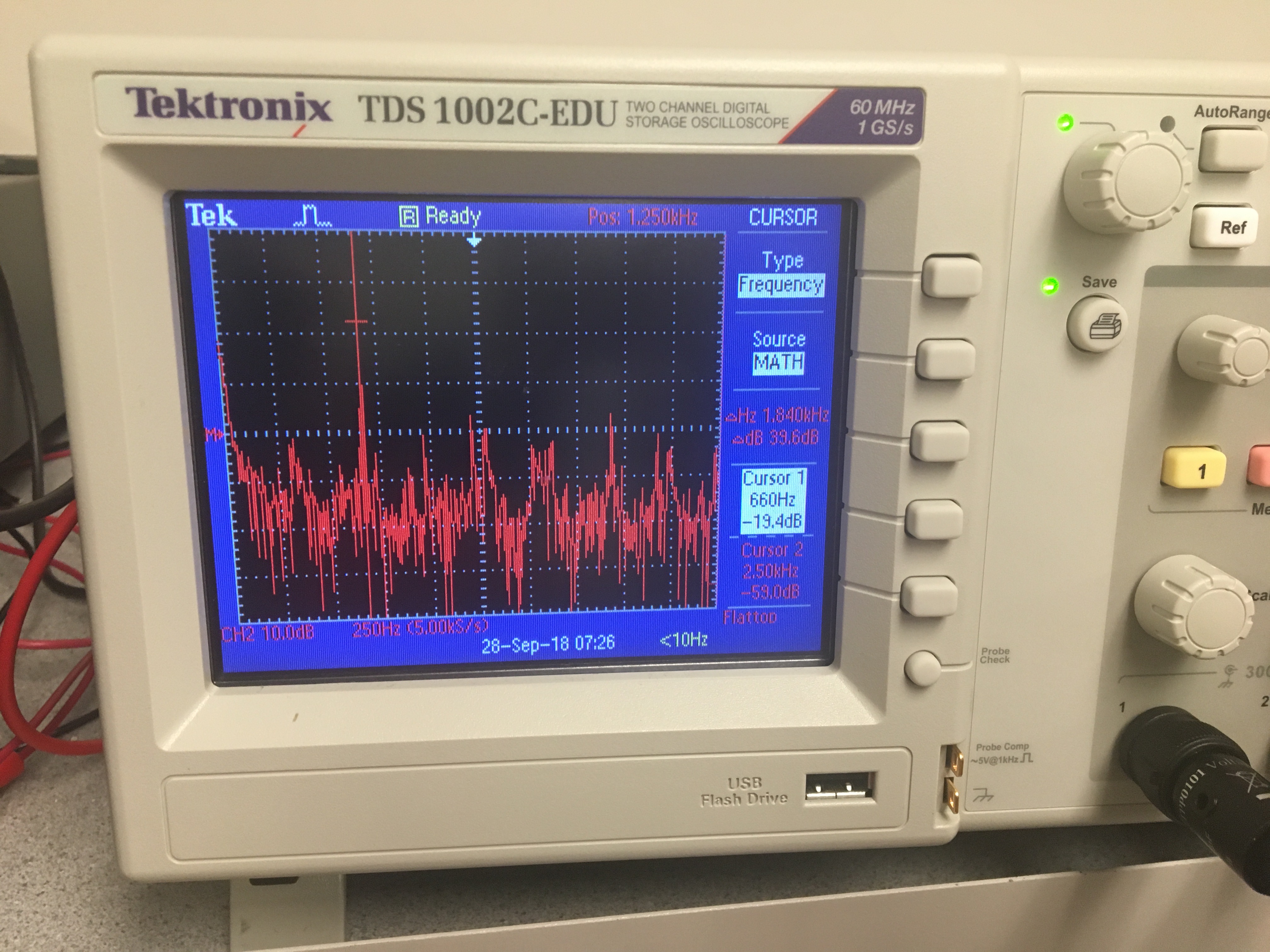
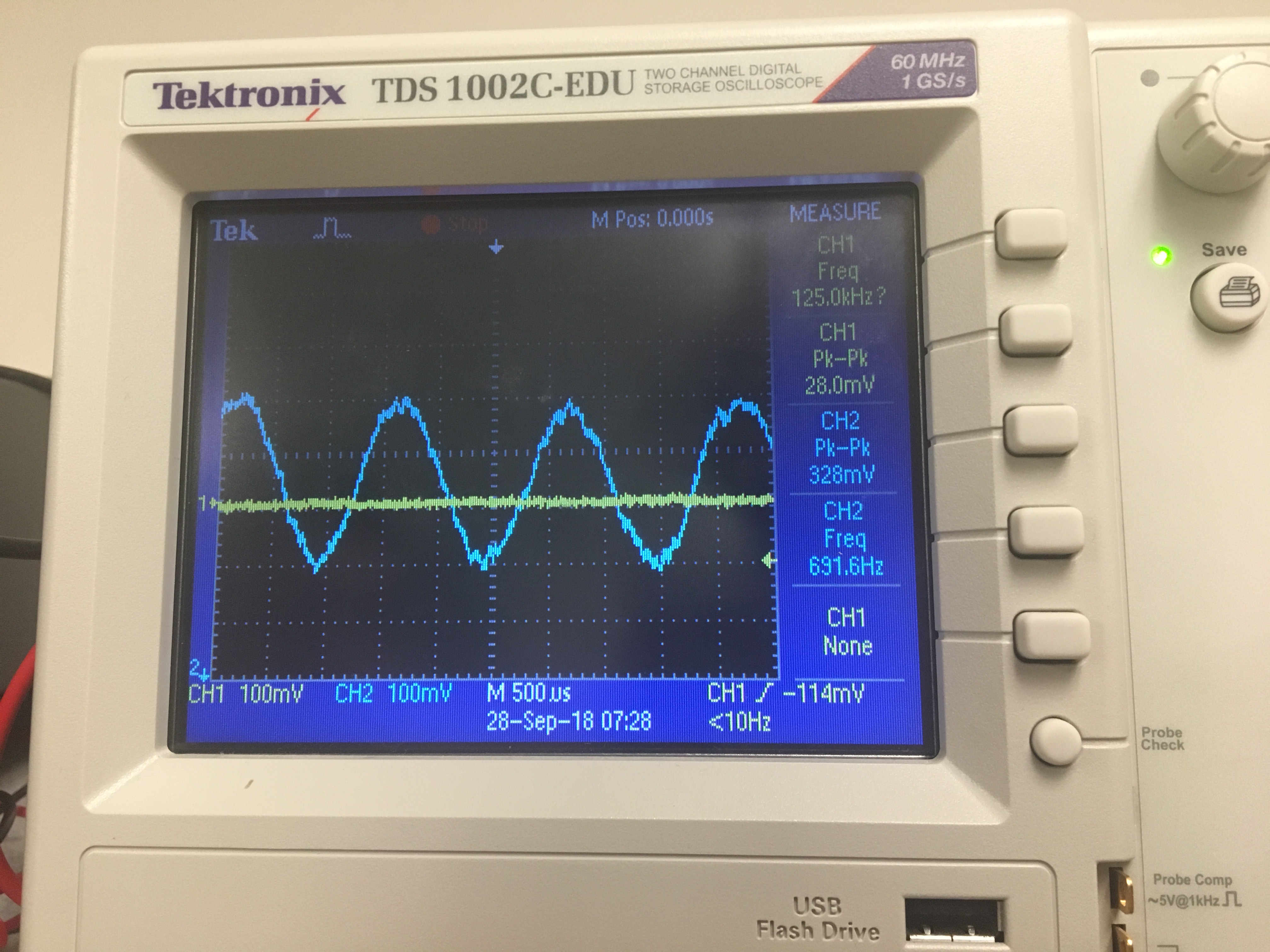
The whole point of this additional circuit was to amplify the output so as to make the signal detectable from a farther distance. The original gain of the amplifier circuit when it was simply a non-inverting amplifier is shown on the left. The final gain of the enture circuit, with the capacitor and voltage divider, is shown on the right.